EEGR 499 Spring 2025 Capstone
Project STARVE is a university project I led the development of in my EEGR 499 Elective Class. I developed the project’s CAD, software framework, and manufacturing requirements. I built this machine in one semester and presented it to the project’s company sponsor. Due to the inaugural success of this project, they have continued to fund the materials for new students to take the reins and develop.
The initial problem was that the company needed an accurate, real-time threat-identification reporting system that would minimize the risk to human life while maintaining a minimal profile. These types of robots would be useful for military operations as well as for hazard response and search-and-rescue teams.
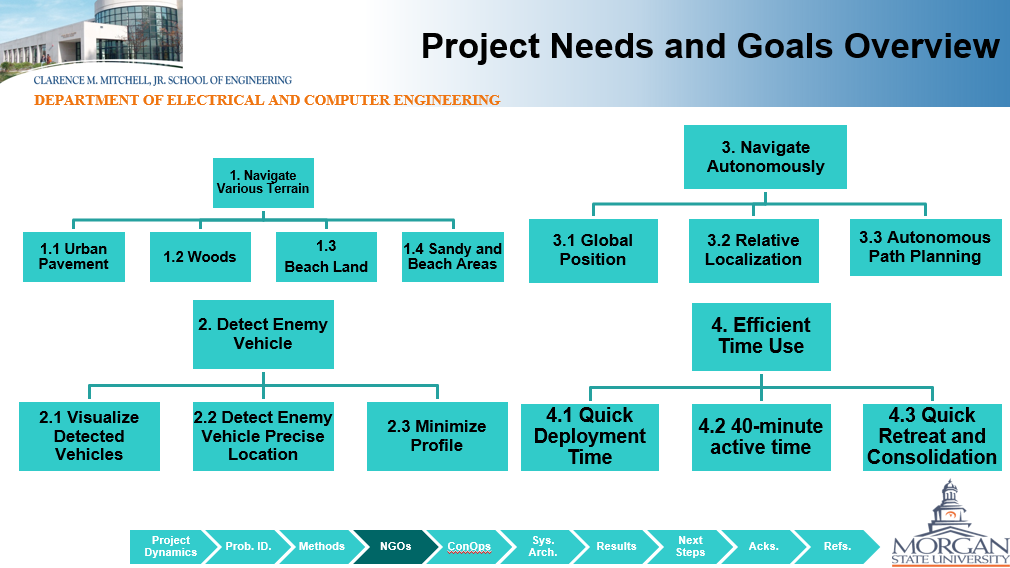
The overall goals that needed to be hit were:
- Navigating Various Terrain
- Object recognition of threats
- Autonomous actuation and navigation
- Efficient time use
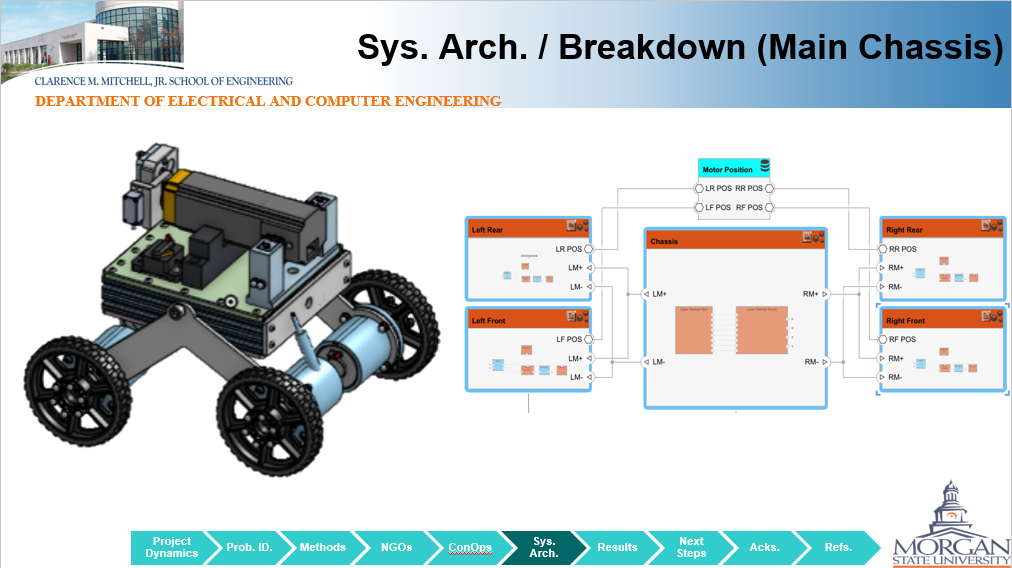
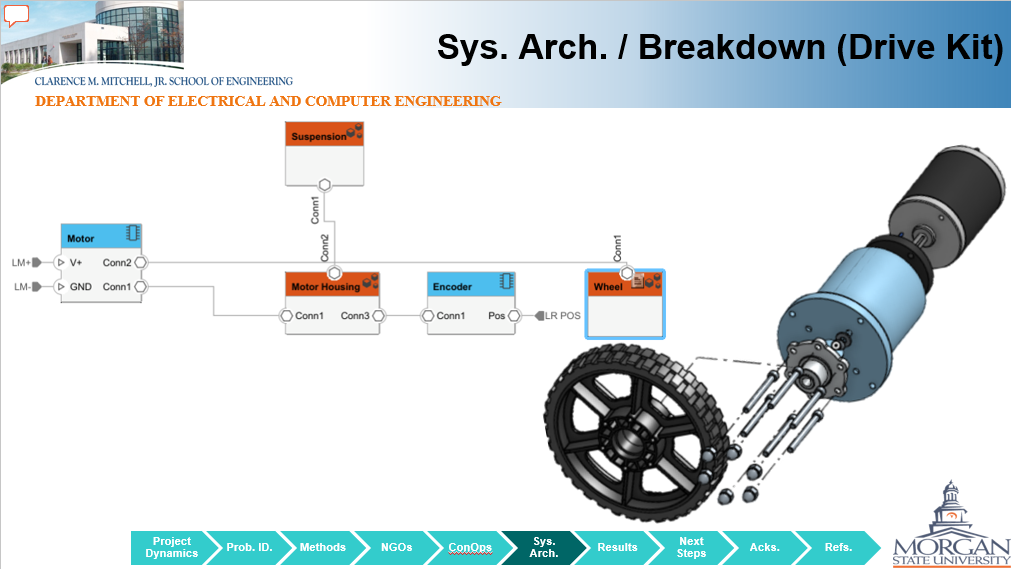
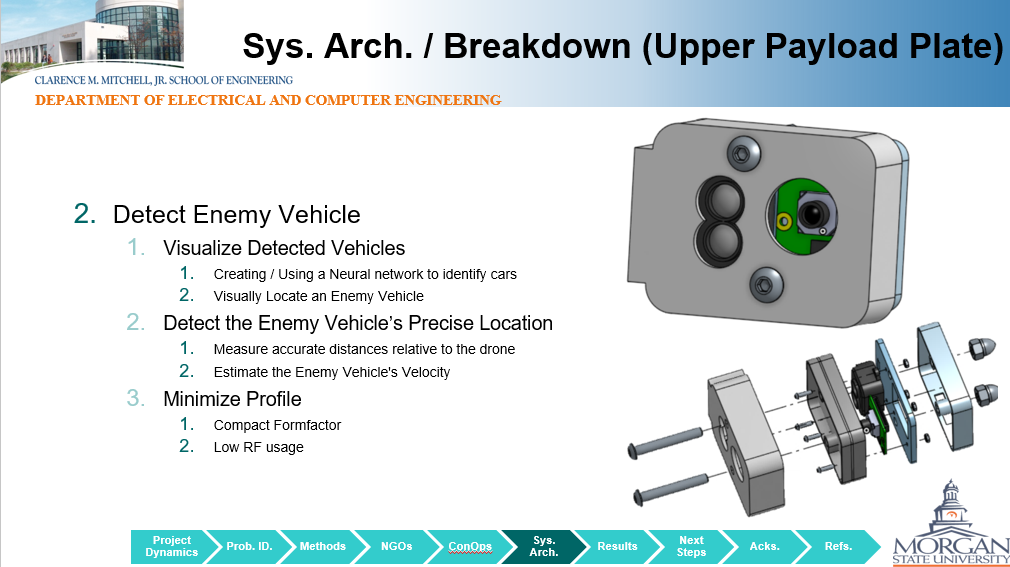
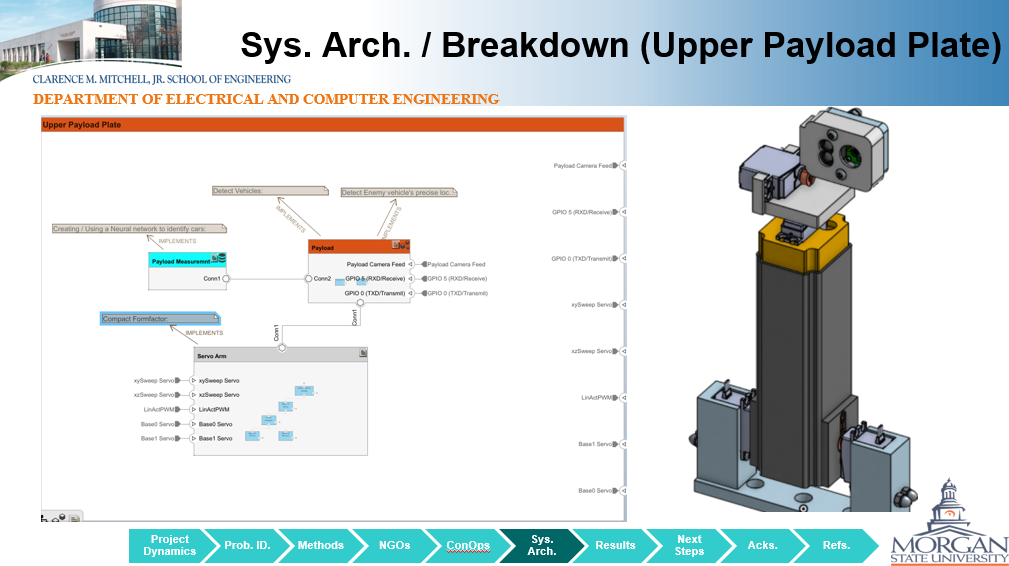
Below are a few diagrams that tour and explain the Robot.
 |
 |
 |
 |
Accomplishments and Next Steps
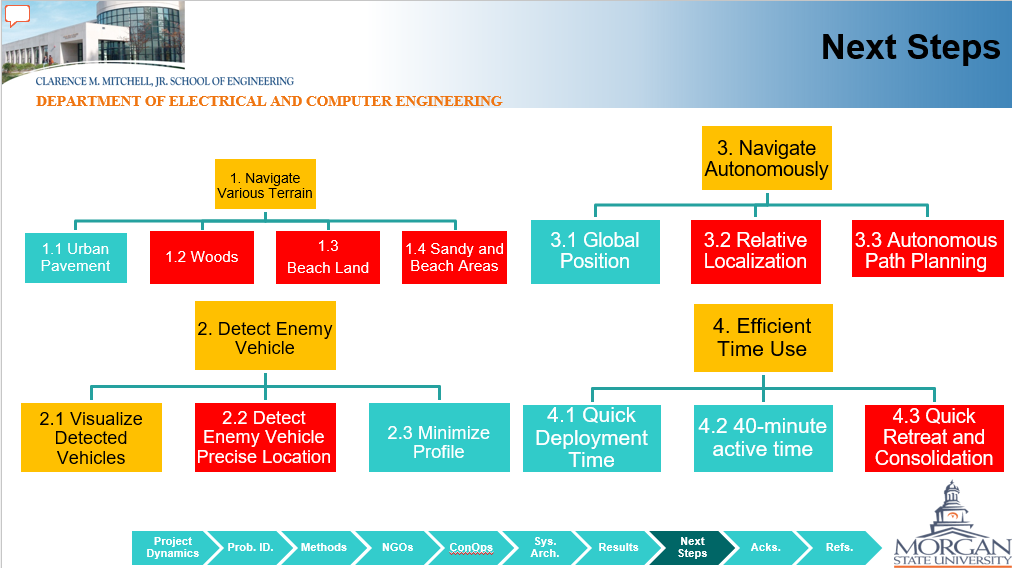
Green - Implemented | Yellow - Partially Implemented | Red - Unsuccessfully Implemented
There were a handful of bugs and not rushed implementations that need to be revisited for this to be a complete product. The next priamary focoues are:
- Revamp Terrain Navigation
- Kit the robot with better software for autonomous navigation
- Implement Camera hardware for object detection capabilities.