From my personal and academic endeavors...
Project STARVE
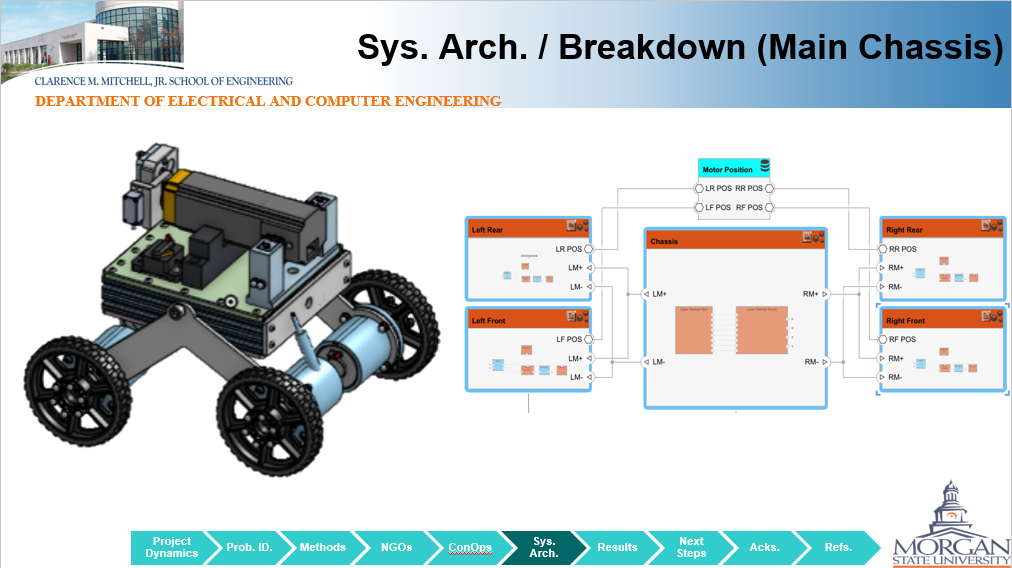
An unmanned system for navigating varied terrain, collecting intelligence, and detecting nearby threats in a combat environment.
ASME E-HPVC

ASME's e-Human Powered Vehicle Challenge (e-HPVC), is an engineering design and innovation competition that gives students the opportunity to apply engineering principles through the design, fabrication, and racing of human powered vehicles.
ASME MOROC
MOROC is an educational initiative I spearheaded under Morgan State's ASME Student Section to promote the understanding of robotics and engineering principles to high school and middle school students.
Low Fidelity Autonomous Drone Flight
This project proposes a low-cost alternative by developing a drone model that uses low-fidelity perception from simple cameras and an inertial measurement unit (IMU), combined with machine learning (ML) techniques to compensate for sensing limitations.
Cornhole Robot
The goal of these robots will be to introduce the general public to robotics in a fun and educational manner. The robot will be designed to play cornhole either through a stylized web-based terminal or via game controllers. The robots will have simple builds so that they can be used to demonstrate the fundamental parts of a robot.